Solutions
Concept:
The efficiency of riveted joints id defined as the ratio of strength of riveted joint to the strength of unriveted solid plate. The strength of the rivested joint is the lowest value of Ps, Pt and Pc.
Strength of solid plate is given by
P = ptσt
Therefore the efficiency is given by
η =
(i) Tensile strength of Plate between rivets
Due to the tensile stresses in the main plates, themain plate or cover plates may tear off across a row of rivets as shown in Fig:
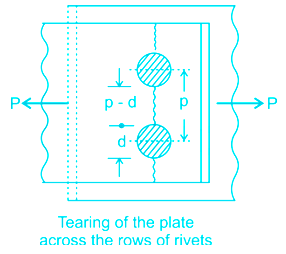
Pt is the tensile strength of plate between rivets and is given by
The resistance offered by the plate against tearing is known as tearing resistance
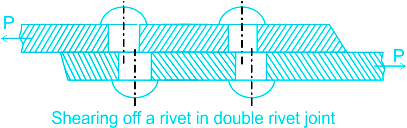
(ii) Shear Strength of Rivet
Shearing of the rivets: The plates which are connected by the rivets exert tensile stress on
the rivets, and if the rivets are unable to resist the stress, they are sheared off.
The resistance offered by a rivet to be sheared off is known as shearing resistance or shearing strength or shearing value of the rivet

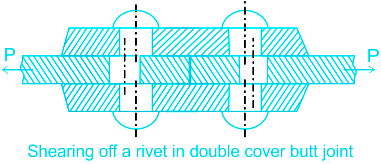
d = Diameter of the rivet hole, τ = Safe permissible shear stress for the rivet material, and n = Number of rivets per pitch length
Shearing resistance or pull required to shear off the rivet per pitch length:
So, the strength equation for the rivet in the double-riveted joints is given by:
(iii) Crushing Strength Pc of the plate is given by
Pc = d x t x σc x n
d = Diameter of the rivet, t= thickness of the plate, σc = compressive strength of the plate.




 Time Taken: -
Time Taken: - 


 ×
×
 Bank
Bank







 SSC
SSC









 Railway
Railway







 State
State




 Other
Other


 Teaching
Teaching




 Insurance
Insurance


 Medical
Medical



 Engineering
Engineering















 Defence
Defence





 GATE
GATE





 NTA CUET
NTA CUET

 UPSC
UPSC

 MBA Entrance
MBA Entrance








 LAW
LAW

 WBJEE 2025
WBJEE 2025
 JEE Advanced 2025
JEE Advanced 2025
 CUET UG 2025
CUET UG 2025
 RRB NTPC 2024-25
RRB NTPC 2024-25
 Railway Group D 2025
Railway Group D 2025
 Bihar Police Constable 2025
Bihar Police Constable 2025
 RRB ALP CBT-I 2025
RRB ALP CBT-I 2025







